#include <IncrementalSVD.h>
Public Member Functions | |
| IncrementalSVD (Options options, const std::string &basis_file_name) | |
| Constructor. More... | |
| virtual | ~IncrementalSVD () |
| Destructor. | |
| virtual bool | takeSample (double *u_in, bool add_without_increase=false) override |
| Sample new state, u_in, at the given time. More... | |
| std::shared_ptr< const Matrix > | getSpatialBasis () override |
| Returns the basis vectors for the current time interval as a Matrix. More... | |
| std::shared_ptr< const Matrix > | getTemporalBasis () override |
| Returns the temporal basis vectors for the current time interval as a Matrix. More... | |
| std::shared_ptr< const Vector > | getSingularValues () override |
| Returns the singular values for the current time interval. More... | |
| std::shared_ptr< const Matrix > | getSnapshotMatrix () override |
| Returns the snapshot matrix for the current time interval. More... | |
 Public Member Functions inherited from CAROM::SVD Public Member Functions inherited from CAROM::SVD | |
| SVD (Options options) | |
| Constructor. More... | |
| int | getDim () const |
| Returns the dimension of the system on this processor. More... | |
| int | getNumSamples () const |
| Get the number of samples taken. | |
| int | getMaxNumSamples () const |
| Get the maximum number of samples that can be taken. SVD class will return an error if the number of samples exceeds the maximum. | |
Protected Member Functions | |
| virtual void | buildInitialSVD (double *u)=0 |
| Constructs the first SVD. More... | |
| virtual bool | buildIncrementalSVD (double *u, bool add_without_increase=false) |
| Adds the new sampled the state vector, u, to the system. More... | |
| virtual void | computeBasis ()=0 |
| Computes the current basis vectors. | |
| void | constructQ (double *&Q, const Vector &l, double k) |
| Construct the matrix Q whose SVD is needed. More... | |
| bool | svd (double *A, Matrix *&U, Matrix *&S, Matrix *&V) |
| Given a matrix, A, returns 2 of the 3 components of its singular value decomposition. The right singular vectors are not needed and therefore not returned. More... | |
| virtual void | addLinearlyDependentSample (const Matrix &A, const Matrix &W, const Matrix &sigma)=0 |
| Add a linearly dependent sample to the SVD. More... | |
| virtual void | addNewSample (const Vector &j, const Matrix &A, const Matrix &W, const Matrix &sigma)=0 |
| Add a new, unique sample to the SVD. More... | |
| int | numSamples () |
| The number of samples stored. More... | |
| double | checkOrthogonality (const Matrix &m) |
| Computes and returns the orthogonality of m. More... | |
| Protected Member Functions inherited from CAROM::SVD | |
| bool | isFirstSample () const |
| Returns true if the next sample will result in a new time interval. More... | |
Protected Attributes | |
| double | d_linearity_tol |
| Tolerance to determine whether or not a sample is linearly dependent. | |
| bool | d_skip_linearly_dependent |
| Whether to skip linearly dependent samples. | |
| int | d_max_basis_dimension |
| The maximum basis dimension. | |
| int | d_size |
| The total number of processors. | |
| int | d_rank |
| The rank of the processor owning this object. | |
| std::vector< int > | d_proc_dims |
| The dimension of the system on each processor. | |
| long int | d_total_dim |
| The total dimension of the system. | |
| bool | d_save_state |
| If true the state of the SVD will be written to disk when the object is deleted. If there are multiple time intervals then the state will not be saved as restoring such a state makes no sense. | |
| bool | d_update_right_SV |
| Whether to update the right singular vectors. | |
| Database * | d_state_database |
| Pointer to the database that will hold saved state data if the state is to be saved. | |
| std::string | d_state_file_name |
| The name of file to which state is saved or restored from. | |
| Protected Attributes inherited from CAROM::SVD | |
| const int | d_dim |
| Dimension of the system. | |
| int | d_num_samples |
| Number of samples stored for the current time interval. | |
| int | d_num_rows_of_W |
| Number of rows in right singular matrix. | |
| const int | d_max_num_samples |
| The maximum number of samples. | |
| std::shared_ptr< Matrix > | d_basis |
| The globalized basis vectors for the current time interval. More... | |
| std::shared_ptr< Matrix > | d_basis_right |
| The globalized right basis vectors for the current time interval. More... | |
| std::shared_ptr< Matrix > | d_U |
| The matrix U which is large. More... | |
| std::shared_ptr< Matrix > | d_W |
| The matrix U which is large. More... | |
| std::shared_ptr< Vector > | d_S |
| The vector S which is small. More... | |
| std::shared_ptr< Matrix > | d_snapshots |
| The globalized snapshot vectors for the current time interval. More... | |
| bool | d_debug_algorithm |
| Flag to indicate if results of algorithm should be printed for debugging purposes. | |
Static Protected Attributes | |
| static const int | COMMUNICATE_U = 666 |
| MPI message tag. | |
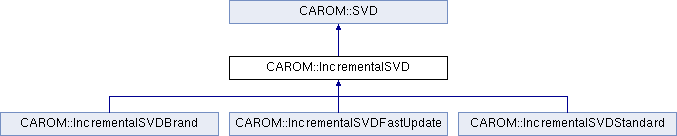
Detailed Description
Abstract class IncrementalSVD defines the internal API of the incremental SVD algorithm.
Definition at line 27 of file IncrementalSVD.h.
Constructor & Destructor Documentation
◆ IncrementalSVD()
| CAROM::IncrementalSVD::IncrementalSVD | ( | Options | options, |
| const std::string & | basis_file_name | ||
| ) |
Constructor.
- Parameters
-
[in] options The struct containing the options for this abstract SVD class. [in] basis_file_name The base part of the name of the file containing the basis vectors. Each process will append its process ID to this base name.
- See also
- Options
Definition at line 38 of file IncrementalSVD.cpp.
Member Function Documentation
◆ addLinearlyDependentSample()
|
protectedpure virtual |
Add a linearly dependent sample to the SVD.
- Parameters
-
[in] A The left singular vectors. [in] W The right singular vectors. [in] sigma The singular values.
◆ addNewSample()
|
protectedpure virtual |
Add a new, unique sample to the SVD.
- Parameters
-
[in] j The new column of d_U. [in] A The left singular vectors. [in] W The right singular vectors. [in] sigma The singular values.
◆ buildIncrementalSVD()
|
protectedvirtual |
Adds the new sampled the state vector, u, to the system.
- Precondition
- u != 0
- Parameters
-
[in] u The new state. [in] add_without_increase If true, addLinearlyDependent is invoked.
- Returns
- True if building the incremental SVD was successful.
Definition at line 281 of file IncrementalSVD.cpp.
◆ buildInitialSVD()
|
protectedpure virtual |
◆ checkOrthogonality()
|
protected |
Computes and returns the orthogonality of m.
- Parameters
-
[in] m The matrix to check.
- Returns
- The orthogonality of m.
Definition at line 507 of file IncrementalSVD.cpp.
◆ constructQ()
|
protected |
Construct the matrix Q whose SVD is needed.
- Precondition
- l.dim() == numSamples()
- Parameters
-
[out] Q The matrix to be constructed. [d_S,l; 0,k] [in] l The last column of Q. [in] k The lower right element of Q.
Definition at line 390 of file IncrementalSVD.cpp.
◆ getSingularValues()
|
overridevirtual |
Returns the singular values for the current time interval.
- Returns
- The singular values for the current time interval.
Implements CAROM::SVD.
Definition at line 266 of file IncrementalSVD.cpp.
◆ getSnapshotMatrix()
|
overridevirtual |
Returns the snapshot matrix for the current time interval.
- Returns
- The snapshot matrix for the current time interval.
Implements CAROM::SVD.
Definition at line 273 of file IncrementalSVD.cpp.
◆ getSpatialBasis()
|
overridevirtual |
Returns the basis vectors for the current time interval as a Matrix.
- Returns
- The basis vectors for the current time interval.
Implements CAROM::SVD.
Reimplemented in CAROM::IncrementalSVDBrand.
Definition at line 252 of file IncrementalSVD.cpp.
◆ getTemporalBasis()
|
overridevirtual |
Returns the temporal basis vectors for the current time interval as a Matrix.
- Returns
- The temporal basis vectors for the current time interval.
Implements CAROM::SVD.
Reimplemented in CAROM::IncrementalSVDBrand.
Definition at line 259 of file IncrementalSVD.cpp.
◆ numSamples()
|
inlineprotected |
The number of samples stored.
- Returns
- The number of samples stored.
Definition at line 208 of file IncrementalSVD.h.
◆ svd()
Given a matrix, A, returns 2 of the 3 components of its singular value decomposition. The right singular vectors are not needed and therefore not returned.
- Precondition
- A != 0
- Parameters
-
[in] A The matrix whose SVD is needed. [out] U The left singular vectors of A. [out] S The singular values of A. [out] V The right singular vectors of A.
- Returns
- True if the SVD succeeded.
Definition at line 426 of file IncrementalSVD.cpp.
◆ takeSample()
|
overridevirtual |
Sample new state, u_in, at the given time.
- Precondition
- u_in != 0
- Parameters
-
[in] u_in The state at the specified time. [in] add_without_increase If true, addLinearlyDependent is invoked.
- Returns
- True if the sampling was successful.
Implements CAROM::SVD.
Definition at line 174 of file IncrementalSVD.cpp.
The documentation for this class was generated from the following files:
- lib/linalg/svd/IncrementalSVD.h
- lib/linalg/svd/IncrementalSVD.cpp